8 Component of Robot: Sensor-I#
October 29, 2024
Robots are made up by integrating complex elements which are crucial to execute various tasks either autonomously or semi-autonomously with some human interventions. These components pivotal to robot’s functionality includes both hardware (mechanical and electrical/electronic components) and software (algorithm and control systems) constituents which facilitates together in enabling the robot to sense, process and act within its surrounding. This article commences the beginning of the main components of a robotic system consist of sensors, actuators, control systems, mechanical structures, end-effectors, power supplies, processing units, communication systems, software and programming, human-robot interface. In this article the elements of sensor component of a robot such as vision, proximity and tactile sensors are discussed in detail. You can access the previous article on classification of robots based on autonomy, applications, power source and generation by clicking here.
Sensors#
Sensors replicate the functionality of human senses like that of sight, touch, hearing and convert external stimuli into electrical signals that a robot’s processing unit can interpret. Sensors are those components of a robot through which it is able to collect necessary data to perceive its internal state and external surroundings. This data gathered is very important for the robot’s functionality as it is processed for making decision and adjusting the behaviour of the robot accordingly. Sensors do not directly influence the action of a robot and thus are passive components.
8.1 Vision Sensors#
Vision sensors are basically in the form of cameras which are used by a robot to capture its surrounding through images and video streams and thereby acting as the “eyes of a robot”. These sensors are very crucial for a robot in executing tasks like object perception (detection and recognition), manipulation, inspection and navigation.

Vision Sensor (Source: Freepik)#
8.1.1 Working Principle of Vision Sensor#
Lights coming from the objects are captured by vision sensors and are converted into digital signals for further processing using programming algorithms to obtain relevant data. For focusing of light, vision sensors use a lens and for capturing the image they use an array of sensors. Image processing or computer vision techniques are utilized to process the image captured by these sensors.
Many types of vision sensors are utilized commonly in robots. They are as follows:
2D Camera Sensor#
The flat images are captured by these 2D cameras and they are basically similar to standard digital camera like that of a regular smartphone. These are utilized to detect shapes, colors and patterns but are unable to provide information about the depth of the object and thus mostly seen in applications involving basic image processing tasks like barcode scanning or visual inspection.
2D Camera Sensor (Source: Image by studiogstock on Freepik)#
3D Camera Sensor#
These 3D cameras provide the depth information along with the standard image data. 3D imaging is done by commonly used techniques such as
Stereo Vision: These are the type of vision sensors which are similar to human or animal binocular vision. Here two cameras are placed at a distance to capture the same image or scene from two different perspectives and use the obtained difference of the images to calculate the depth and distance of the object and are commonly used in applications requiring depth perception like navigation, recognition and manipulation.

Stereo Vision Sensor (Source: Freepik)#
Structured Light: It is a type of depth-perception method where a pattern of infrared light is emitted to the object and the depth is determined by the distortion in the pattern after hitting the surface of the object. These are usually applied in creating a 3D model of a scene and thus used in environment mapping, human robot interaction, etc.
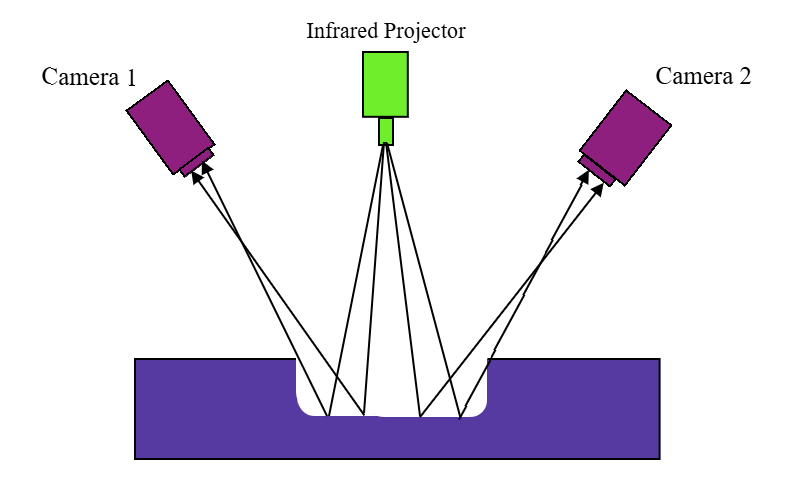
Structured Light Sensor (Source: Image by Author)#
Time-of-Flight (TOF): In this type of vision sensor, the depth is measured using a light source which is travelling to a point on the object and then get back to the sensor after reflecting. The time delay is measured and thus the distance of each point on the object or environment are calculated from the robot and thus helped in obstacle avoidance and navigation through complex environment.
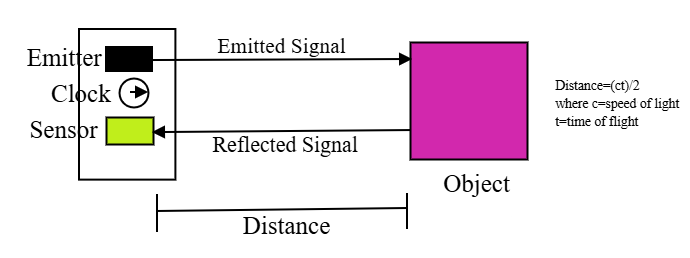
Time-of-Flight Sensor (Source: Image by Author)#
8.1.2 Applications of Vision Sensors#
Vision sensors find very wide applications ranging from manufacturing robots where they are used for visual inspection, defect detection, quality control; and in autonomous vehicles for obstacle detection and avoidance, pedestrian recognition, etc.
8.2 Proximity Sensors#
These are the type of sensors which are capable of detecting the presence of objects within a certain range without the necessity of any physical contact. They are very useful in applications where collaborative environment of human and robots are in operation and there is need for collision avoidance, human detection as well positioning of the robotic end effector. These sensors also find applications in autonomous vehicles where it is very crucial to detect and avoid pedestrian or any other objects for safe navigation.
Proximity Sensor (Source: Image by xvector on Freepik)#
8.2.1 Working Principle of Proximity Sensors#
In proximity sensor, a signal (light, sound or electromagnetic field) is released and when some objects come within the range of the sensor, then it detects the changes in the signal and thus allowing it to estimate the position or proximity of those objects.
Proximity sensors are classified mainly on the basis of the type of signal. They are as follows
Inductive Proximity Sensor
Useful for sensing the presence of metallic objects, these sensors use an electromagnetic field which after reflecting from the metallic objects, induces an eddy current thereby disturbing the field which is basically detected by the sensors. The range of these sensors are very short up to a few centimetres.
Capacitive Proximity Sensor
These sensors can detect both metallic and non-metallic objects by detecting the changes in capacitance between the object and the sensor when it comes within the range of these sensors. Their range is from short to medium (greater than two centimetres).
Ultrasonic Proximity Sensor
These sensors project ultrasonic sound waves and measure the time taken for the reflected echo to come back from any object present within its range and thus estimating the distance of the object from the sensor. These sensors have medium to long ranges and can useful for recognizing any types of objects irrespective of their colour or transparency.
Infrared Proximity Sensor
These sensors emit infrared light which upon reflection from any object nearby the measurement of the intensity and angle of reflected light by the sensors determine the proximity or distance of the object. Used for short to medium ranges from few centimetres up to fifty centimetres.
Photoelectric Proximity Sensor
Here the sensors emit a beam of light (commonly laser) and detect an object proximity or distance when it reflects or interrupts the beam path. Ranges include form few millimetres to several meters depending on the model.
Magnetic Proximity Sensor
In this type of sensors, the change in magnetic field is used to detect the proximity or distance of the object which comes in the range of the magnetic field of these sensors. These sensors are usually used for sensing ferromagnetic objects or magnets and provides a short range up to some centimetres.
8.2.2 Applications of Proximity Sensors#
Huge applications in industrial automation, obstacle detection and avoidance in autonomous vehicles, robotics, human-robot safe collaborative space (cobots).
8.3 Tactile Sensors#
Tactile sensors are like the sense organs of the robots which provide a feel of physical touch by which the robots can measure the force, pressure or contact of an object and can respond accordingly. They are found in use where delicate handling tasks are done as in grippers, assembly or medical procedures and also safe human interactions with robots.

Tactile Sensor (Source: image by rawpixel on Freepik)#
8.3.1 Working Principle of Tactile Sensors#
Tactile sensors are based on the working principle where the force, pressure made by the contact with an object are detected and these mechanical signals are converted into electrical signals and further processed to provide the information regarding the magnitude, direction of the force or even the texture of the object.
The tactile sensors are classified based on their sensing mechanism as follows:
Resistive Tactile Sensor
Electrical resistance is changed due to deformation of top layer in these sensors when a force/pressure is applied. This change in resistance is used for determining the force/pressure.
Capacitive Tactile Sensor
In these sensors, when force/pressure is applied, the distance between two conductive plates changes. This change in distance causes a change in capacitance, which is used for detecting the magnitude of the force/pressure applied.
Piezoelectric Tactile Sensor
When mechanical stress/ force is applied on these piezoelectric sensors, an electrical charge is generated which is directly varying with the magnitude of the force/stress applied. Used for applications involving vibrations, dynamic forces, etc.
Optical Tactile Sensor
These sensors determine the magnitude of the force/pressure by detecting the changes in the amount or path of light. Photodetectors are used for recording the variation of the light amount or path.
Magnetic Tactile Sensor
Magnets or magnetic materials are used by these sensors to record changes in magnetic field due to touch or force/pressure and thus magnitude and direction of the force is estimated. These sensors are also very sensitive to small displacements.
8.3.2 Applications of Tactile Sensors#
Tactile sensors are commonly utilized in robot gripper manipulation operation, touch screen displays, pressure sensing applications, vibration and dynamic force measurements, artificial skin, robotic surgery, etc.
In the following article the details of other sensors like position and motion sensor, force and torque sensor, temperature sensor, sound sensor and chemical sensor will be discussed.