9 Component of Robot: Sensor-II#
October 30, 2024
The previous article “Component of Robot: Sensor-I” focused on three types of sensor elements namely vision sensor, proximity sensor and tactile sensor. This article explains the elements of sensor component such as position and motion sensors, force and torque sensors, temperature sensors, sound sensors and chemical sensors.
9.1 Position and Motion Sensors#
Position sensors help in determining an object’s particular absolute location and orientation if it comes within the range of the sensors. Similarly motion sensors detects the changes in the location and orientation of the object within the range. These are used for obtaining information about the positioning of the object and the robot in space as well as the precise control of the movement of the robot along the environment.
9.1.1 Working Principle#
They work by recording the displacement, velocity and accelerations of the robot’s elements or whole body.
Common types of Position Sensors are as follows
Potentiometers
Potentiometers sense position based on the change in resistance. Here the mechanical position (angular or linear displacement) is converted into a voltage signal as output by motion of a wiper along a resistive path, varying the resistance which is detected by the sensor as position information.
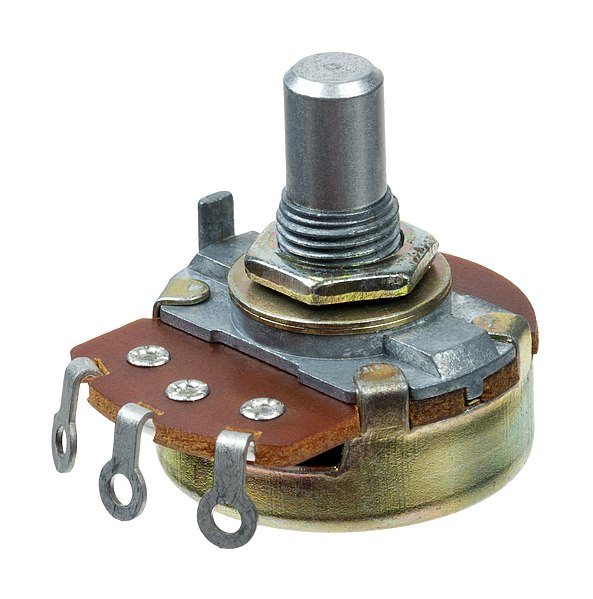
Potentiometer (Source: Image by Evan-Amos on Wikimedia Commons)#
Encoders
These are the sensors used in robotics for precise motion control and they convert the motion (rotary or linear) into digital signals thereby extracting the position, velocity and direction information.
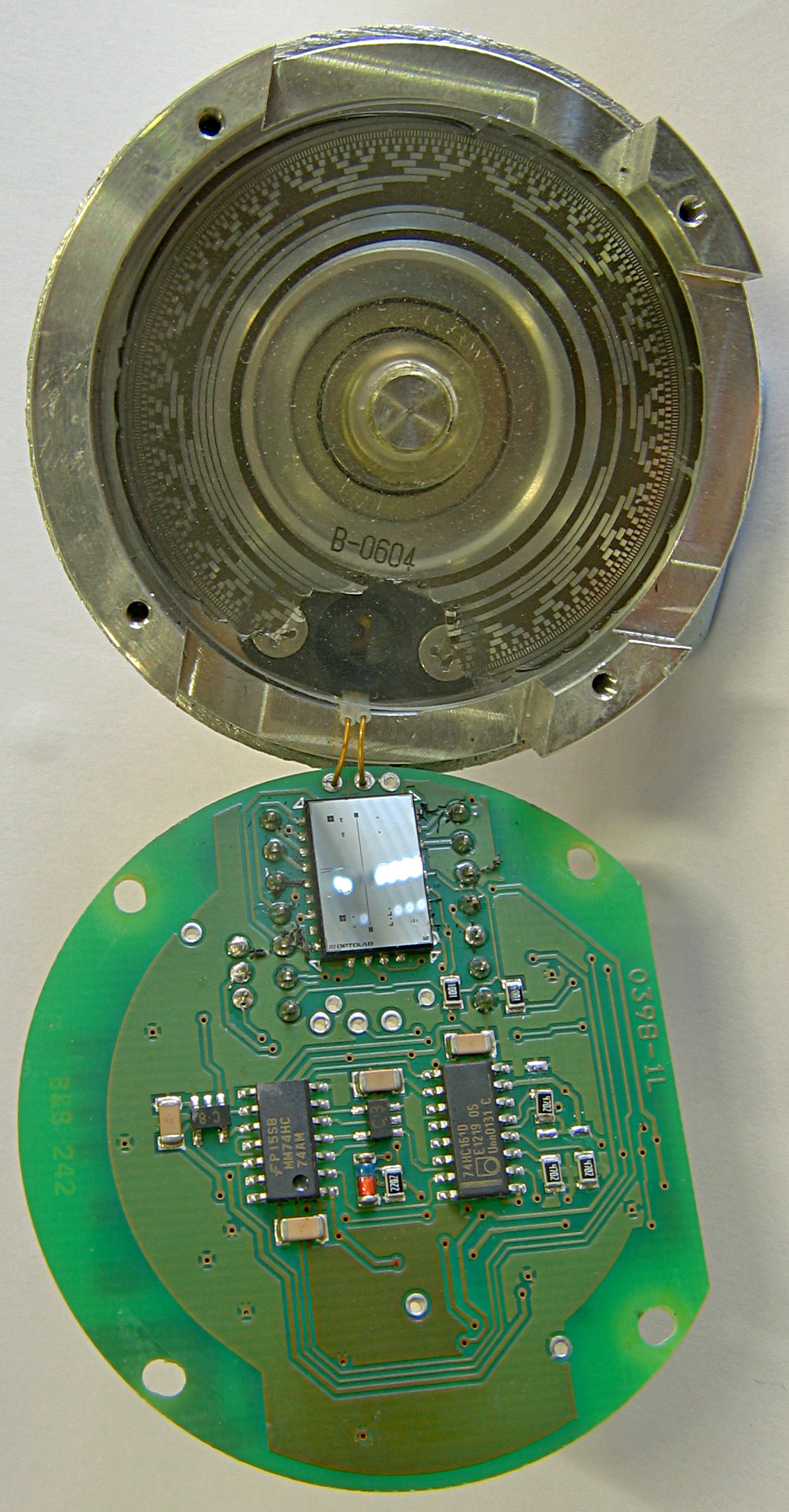
Rotary Encoder (Source: Wikimedia Commons)#
Hall-Effect Sensor
These sensors produce a voltage signal when a magnetic field interacts with them and thus estimate the position of objects with magnetic properties.
LVDTs (Linear Variable Differential Transformer)
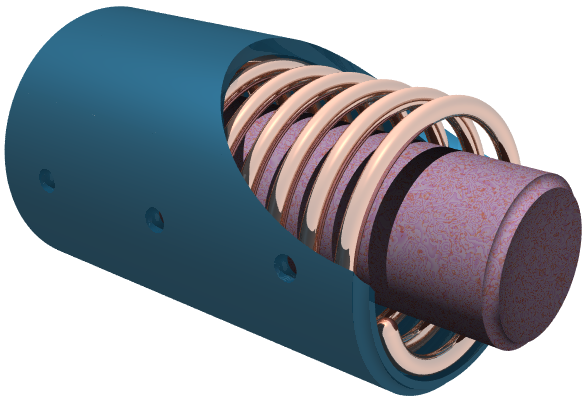
Here in these sensors, the linear displacement is recorded by a core that moves within coils. The change in inductance in these coils is used to estimate the linear position.
Magnetostrictive Sensor
These sensors use the magnetostrictive property of a material where the shape and or dimension of the material changes when put inside a magnetic field of the object and thus can determine the position or relative change of the position of the object.
Magnetostrictive Sensor (Source: Wikimedia Commons)#
GPS Sensor
These sensors find application in outdoor autonomous vehicles as they use satellite signals to provide absolute position and are used for navigation and localization.

GPS Sensor (Source: Image by studiogstock on Freepik)#
Key motion sensors include
Accelerometers
Accelerometers use Micro-Electro-Mechanical Systems (MEMS) for converting accelerations into electrical signals and measure it in one or more directions.
Gyroscopes
These sensors record rotational velocity of the robot and thus estimate the orientation and rotation in three dimensions. They also use MEMS.
Gyroscope (Source: Image by Lucas Veira on Wikimedia Commons)#
Inertial Measurement Unit
These sensors are a combination of multiple motion-sensing elements like accelerometers, gyroscopes and sometimes magnetometers so that they are capable of measuring linear accelerations, rotational velocity and orientation of the robot and thus can obtain an overview of the orientation and motion of the robot in 3D space. They are basically used for self-balancing and aerial drones.
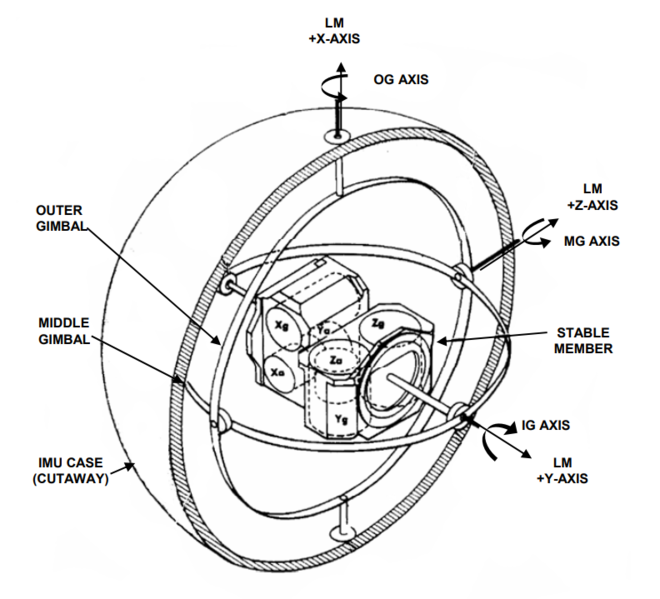
Inertial Measurement Unit (Source: Image by NASA on Wikimedia Commons)#
Optical Flow Sensor
This type of sensors detects the change in pixels’ relative motion inside a camera frame and thus measures the speed and direction of an object by processing these pixel shifts.
LiDAR (Light Detecting and Ranging)
Usually used in complex applications like SLAM, 3D mapping, etc., these sensors scan the environment with a laser pulse which is reflected back and the time is calculated to estimate the motion information of the objects.
LiDAR (Source: Image by Mike on Wikimedia Commons)#
9.1.2 Applications#
Position and motion sensors find huge applications in variety of fields such as monitoring of rotating components of a robot, SLAM and 3D mapping, vehicle guidance, autonomous mobile robot, GPS, drones and UAV stabilization, self-balancing etc.
9.2 Force and Torque Sensors#
These sensors measure the forces or moments (torques) applied on some parts of the robots in order to have critical and precise control or manipulation like delicate material handling.
9.2.1 Working Principle#
The applied mechanical force or torque is converted into electrical signal in these sensors by some elements such as strain gauge, piezoelectric materials or capacitive components. These components sense the deformation and converts it into electrical signal.
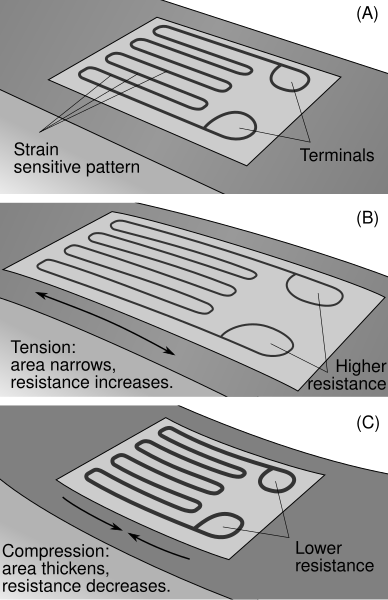
Strain Gauge Sensor (Source: Wikimedia Commons)#
Typical force or torques sensors are as below
Single Axis Force/Torque Sensor
These sensors are used for sensing force/torque applied in a single direction.
Multi Axis Force/Torque Sensor
In these sensors, multiple directions of force/torque are measured thus providing a detailed and precise control or manipulation.
9.2.2 Applications#
Force/Torque sensors are mostly used in assembly operations where holding of the objects require specific contact force/torque, cobots where human safety is essential by avoiding hitting with huge impact force/torque to any human operators, surgery, teleoperation, etc.
9.3 Temperature Sensors#
Temperature sensors are very much useful in regulating or monitoring the robot’s internal systems or external environment to prevent overheating or handling temperature-sensitive tasks like food-processing.
9.3.1 Working Principle#
Temperature sensors work on the principle of converting the change in temperature to readable electrical signal which may be different for different types of sensors like resistance change, Seebeck effect where two metal joined at one end is at different temperature than at the free end of these metals, infrared emission from objects also imply the temperature, etc.
The primary types of temperature sensors used in robotics include
Thermocouple
These sensors measure temperature by joining two wires at one end and it is put into the desired place for temperature sensing, then the open end of the two wires at lower temperature measures a voltage difference which is directly proportional to the temperature sensed.
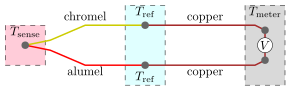
Thermocouple (Source: Image by Nanite on Wikimedia Commons)#
Thermistor
These semiconductor sensors use the resistive property which change non-linearly due to the change in temperature and thus are very sensitive and used for narrow band of temperature.
Resistance Temperature Detectors (RTDs)
Here the sensors use pure metal whose resistance varies linearly with the temperature and thus suitable for predictable, stable and reliable long-term monitoring applications.
Infrared Temperature Sensor
These are non-contact sensors. They sense the temperature by capturing the infrared radiation emitted from the object.

Infrared Temperature Sensor (Source: Image by pikisuperstar on Freepik)#
Semiconductor Temperature Sensor
Highly adaptable to electronic circuit, these sensors use the variation of voltage across the junctions of semiconductor which changes linearly with temperature.
Bimetallic Temperature Sensor
Bimetallic strip sensors consist of two different types of metals joined together with dissimilar expansion coefficients. When the temperature changes, the two strips expand in different rates and thus causing the strip to bend which can be used to activate some temperature-sensitive switches.

Bimetallic Temperature Sensor (Source: Wikimedia Commons)#
9.3.2 Applications#
Used in prevention of overheating of robotics’ components, handling of temperature-sensitive products, thermal monitoring, etc.
9.4 Sound Sensors#
Sound sensors are used to detect and interpret audio signals coming from the environment for the robot to be used in human-robot interactions, voice-command processing as well as security systems.
9.4.1 Working Principle#
These sensors are based on the principle of sound wave detection (pressure waves in air). They are made up of sound-sensitive elements like microphones which record the sound and then transform into electrical signals.
Commonly used sound sensors are
Microphone
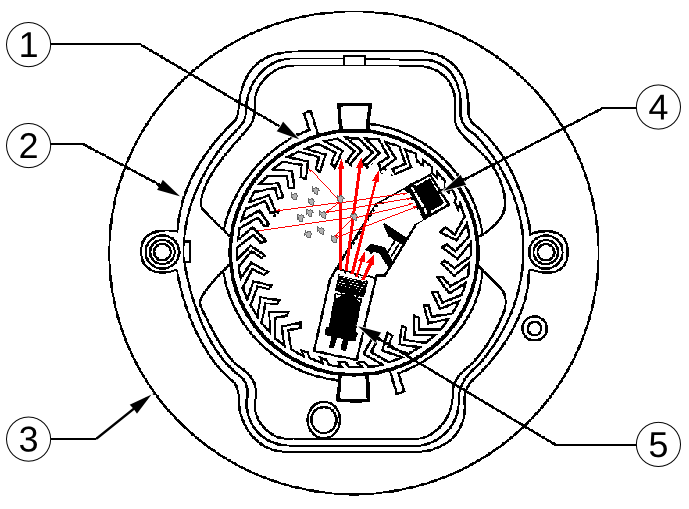
Microphone sensors use different types of materials like diaphragm which deforms due to sound vibration and changes magnetic field or capacitive effect, permanently charged electret, MEMS to convert sound waves to electrical signal.

Microphone Sensor (Source: Image by KamranAydinov on Freepik)#
Ultrasonic Sound Sensor
These sensors detect the high-frequency sound waves for specialized applications like underwater echolocation for missing or drowned ships. Commonly ultrasonic sensors are rather used for detection of obstacle, proximity of objects, etc., instead of traditional sound-sensing.
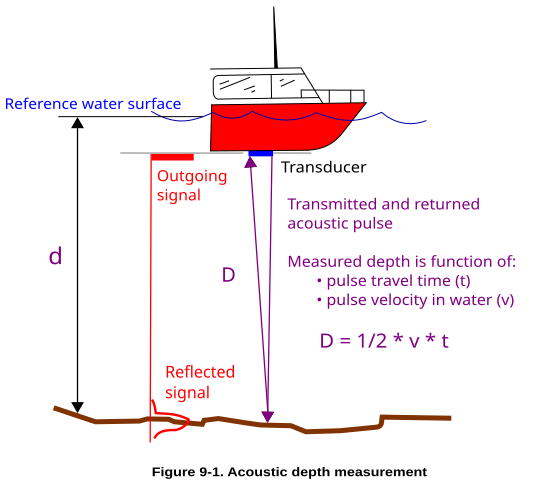
Ultrasound Sensor (Source: Wikimedia Commons)#
9.4.2 Applications#
Can be utilized for various purposes like voice-controlled robots, smart home devices, surveillance systems, voice or speech recognition and monitoring sounds in robot’s environments, etc.
9.5 Chemical Sensors#
Chemical Sensors are basically used to find and analyse any specific chemical substances in the environment by the robot for applications in environment monitoring, healthcare, hazardous or toxic gases detection.
9.5.1 Working Principle#
These sensors use some chemical-sensitive elements which detect the concentration of the chemicals present by changing their physical properties such as resistance or voltage which can be used for measure of the chemical compound. And then the robot can trigger the action like warning, alert or emergency call, etc.
Types of Chemical Sensors used in Robotics are
Gas Sensors
Gas Sensors are often used for detecting toxic gases like methane, carbon monoxide, etc. They are seen mostly in monitoring as well as disaster-response applications.
pH Sensors
These sensors are used in applications where the detection of acidity or alkalinity of solutions are required. Mostly used in industrial processing, agriculture, water quality monitoring as well as healthcare.

pH Sensor (Source: Wikimedia Commons)#
Electrochemical Sensors
These sensors used an electrode which reacts with the target chemical and then a electrochemical reaction results in voltage or current change which is used for detecting the chemical.
Optical Chemical Sensors
These sensors use the principle of light absorption, emission or fluorescence to detect the chemical changes by reacting with optical fibers or dyes which emits/absorbs visible light.
Optical Chemical Sensor (Source: Wikimedia Commons)#
Biosensors
Mostly used medical applications, these sensors use biological elements like enzymes, antibodies or nucleic acids to record changes in biological processes and thus sense specific compounds (mostly biological).
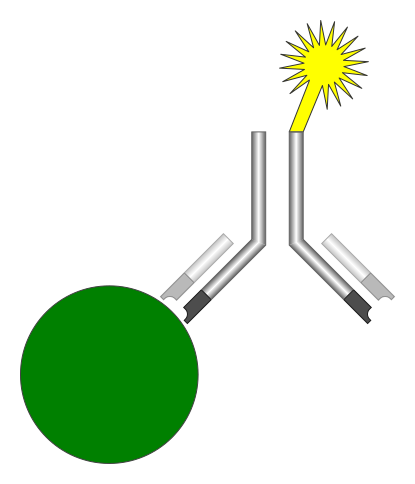
Biosensor (Source: Image by Gringer on Wikimedia Commons)#
9.5.2 Applications#
Used mostly in environmental monitoring, hazardous material detection, agriculture, safety in industrial settings, biomedical applications, healthcare, water quality inspection, etc.
In the following chapter the details of the actuator component of robotics system are discussed.