7 Classification of Robots-III#
October 24, 2024
The previous article “Classification of Robots-II” sheds light on the criteria of mobility, actuation and control system/mechanism of the robot. Here in this article the focus is on classifying the robots based on the criteria of intelligence (autonomy level), application, power source and generation of the robots. The details are discussed as below.
7.1 Based on Intelligence (Autonomy Level)#
It is based on the criterion on how much intelligence the robot has or what is the autonomy level for human intervention for carrying out tasks or operations.
7.1.1 Pre-Programmed Robot (Basic Intelligence)#
Robot which performs repetitive works by following a fixed set of program instructions and having no autonomy. Applications: Manufacturing assembly lines, industrial robots.
7.1.2 Adaptive Robot (Reactive Intelligence)#
These are the robots which usually follow predetermined rules to respond to external stimuli and adjust their actions depending on the feedback from the sensors. Applications: Used in sorting, pick-and-place with objects having some variations.
7.1.3 Autonomous Robot (Learning Intelligence)#
These robots are capable of sensing the surrounding environment, making decision based on the input from the sensor and then acting based on the decision just made, all without any human intervention. Leverages AI and machine learning for improving performance over time. Applications: Self-driving cars, AI drones, service robots.
7.1.4 Advanced Robot (Cognitive Intelligence)#
These are the futuristic robots capable reasoning, decision-making and human-like interactions. Applications: Research projects, Personal assistants.

Advanced Robot (Source: Freepik)#
7.1.5 Collaborative Robot (Cobot)#
Often used alongside humans in a safe manner, these robots have the capability of sharing the decision-making process with the humans. Applications: Assembly lines with complexity requiring human expertise, home assistance tasks, customer service.
7.2 Based on Applications#
It is based on the criterion for the field of applications where robots are used.
7.2.1 Industrial Robot#
It is mainly used for manufacturing, welding, material handling, painting, packaging and assembly operations Applications: Automotive, electronics, aerospace industries, etc.
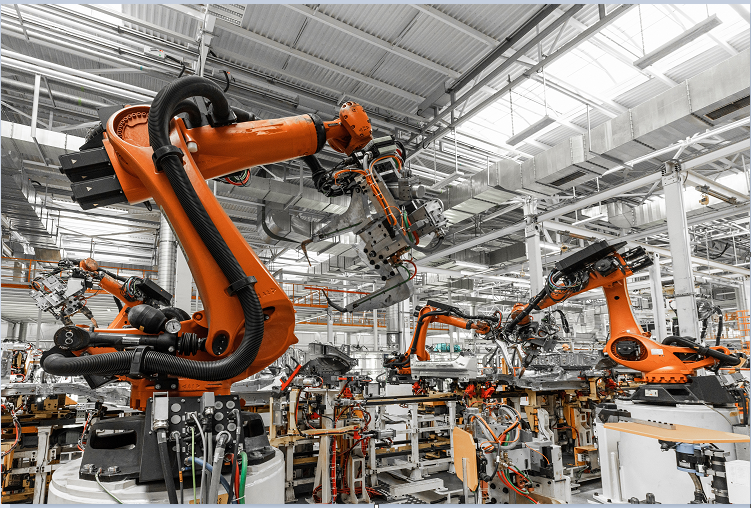
Industrial Robot (Source: Image by usertrmk on Freepik)#
7.2.2 Service Robot#
These robots are often used for non-industrial settings
Applications: Healthcare, home and office assistance, public spaces, delivery, cleaning, customer service, etc.

Service Robot (Source: Freepik)#
7.2.3 Military Robot#
These robots are deployed for defense and tactical operations Applications: Surveillance, bomb disposal, combat support, etc.

Military Robot (Source: Generative AI Tool)#
7.2.4 Medical Robot#
Designed for medical and healthcare applications. Applications: Robotic surgery (e.g., Da Vinci robot), rehabilitation robots, robotic exoskeletons, etc.
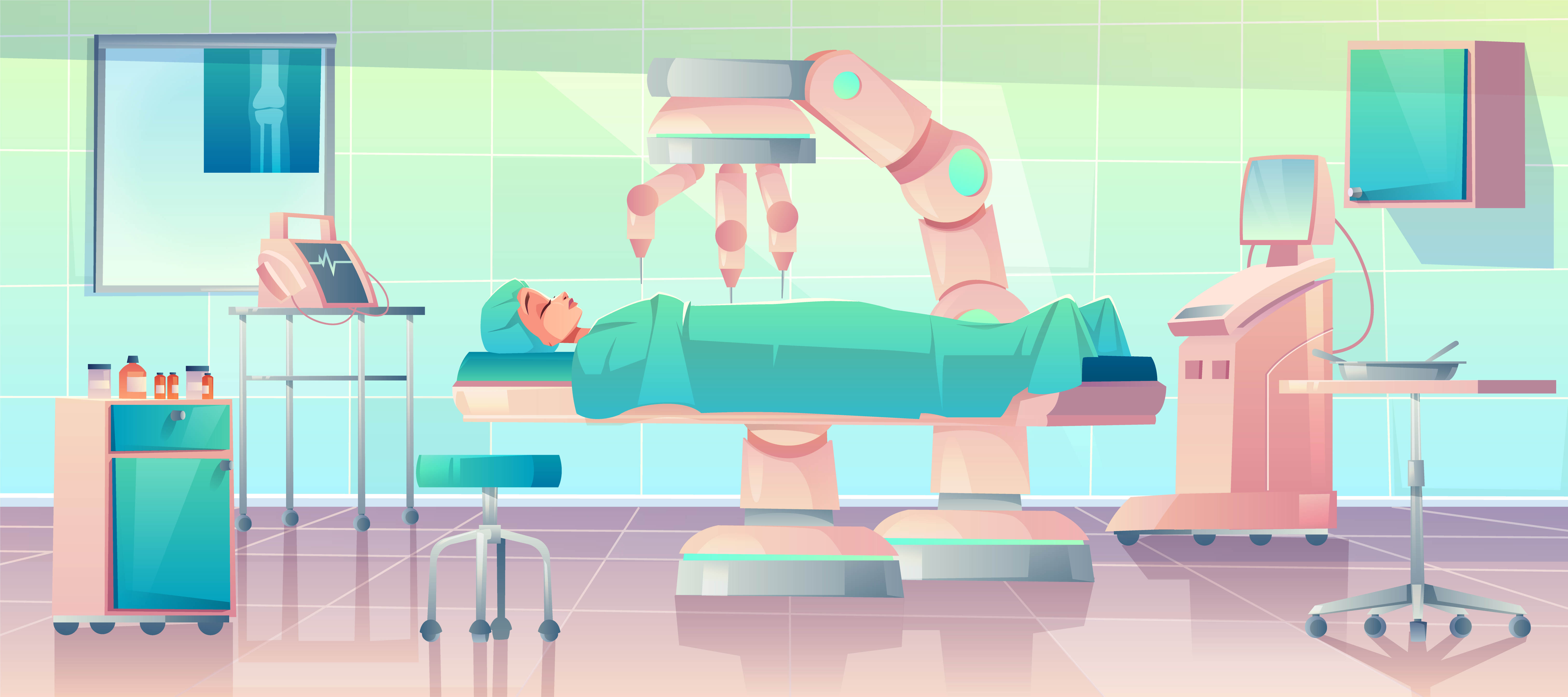
Medical Robot (Source: Image by vectorpouch on Freepik)#
7.2.5 Exploration Robot#
Robots used for space exploration, underwater exploration and in hazardous environments.
Applications: Space rovers (e.g., Mars rovers), underwater drones.
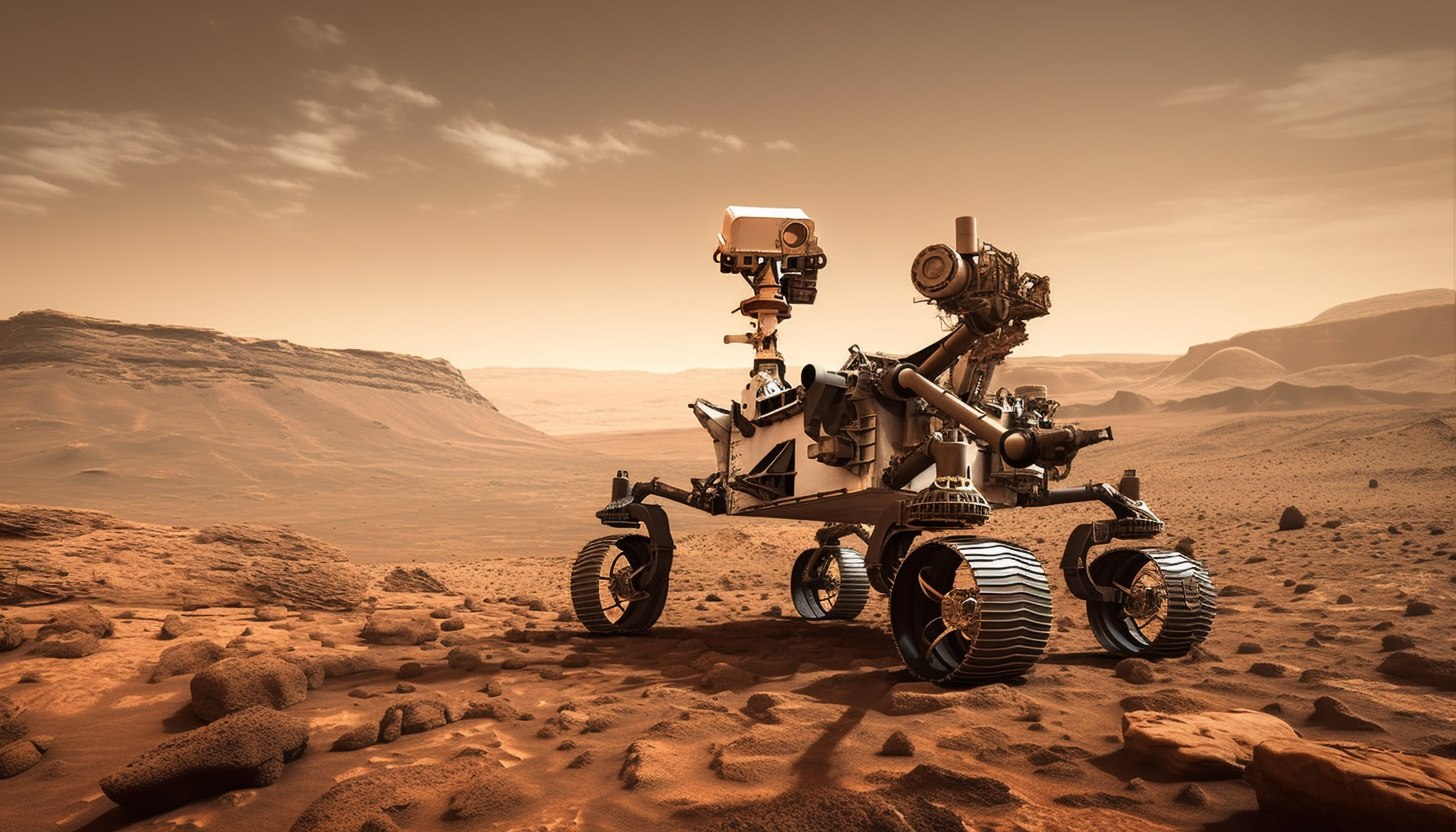
Exploration Robot (Source: Image by vecstock on Freepik)#
7.2.6 Entertainment Robot#
These robots are developed for amusement, pleasure and educational purposes. Applications: Toy robots, theme park animatronics.

Entertainment Robot (Source: Freepik)#
7.3 Based on Power Source#
It is based on the criterion of the source by which the rots are powered or energized.
7.3.1 Battery-Powered Robot#
Robots having portability are powered by batteries. Applications: Drones, mobile robots, service robots.
7.3.2 Solar-Powered Robot#
These robots are powered by solar energy. Applications: used for long-term applications like space exploration robots, environmental monitoring robots.
7.3.3 Wired Robot#
Robots often connected or tethered to power supply source. Applications: Robots used in industrial environment.
7.4 Based on Generation#
It is based on the classification of robot for technological advancements over the generation i.e., how much capabilities and autonomy has increased over the period of time. It encompasses all other classifications and it is just record of gradual development of the robots.
7.4.1 First Generation Robot#
These are basically the first types of simple robots which are having no autonomy and are controlled fully by human or manual means either directly or remotely using some joysticks or teach-pendant. Applications: Early industrial robots like Unimate used for pick-and-place tasks.
7.4.2 Second Generation Robot#
Robots which are intended for structured environments and thus uses simple program instructions with limited decision-making using some feedback mechanisms. They perform basic automated work. Applications: Factory automation like assembly lines, welding, material handling, etc.
7.4.3 Third Generation Robot#
These robots have advanced sensing capabilities using various vision or force sensors and make decision based on the feedback only. Limited learning and adaptability are incorporated in these robots for changing environments. Applications: Complex tasks like manufacturing, inspection and precision assembly, etc.
7.4.4 Fourth Generation Robot#
These are intelligent robots used in unpredictable environments equipped with AI and machine learning which learn and improve performance over time. Applications: Humanoid robots, surgical robots, autonomous vehicles, warehouse robots, rescue and search operations, etc.
7.4.5 Fifth Generation Robot#
These robots are in the conceptual stage but development is ongoing. They are expected to be working in highly unstructured and unpredictable environments and have capabilities of high levels of AI and thus making cognitive robots with human-like intelligence and decision-making. Applications: Advanced healthcare systems, service robots with high level of human interactions, etc.
In the next article the components of the robotic system will be discussed in detail.