4 History and Evolution of Robotics-III#
October 11, 2024
This article explains further development of the modern robotics which merged into the daily life of consumers while in the previous article “History and Evolution of Robotics-II” the main theme was about the evolution of robotics in industrial setup. Click here to visit it if you are new and have not seen it.
4.1 Modern Robotics Part-2#
In 1972, Waseda University developed WABOT-1, the first full-scale humanoid robot with intelligent capabilities. Researchers Pat Ambler, Robin Popplestone, Austin Tate, and Donald Mitchie created two robots, Freddy (1969-71) and Freddy II (1973-76) at the University of Edinburgh’s School of Informatics. In 1974, Michael J. Freeman introduced Leachim, a robot designed to teach, equipped with the curriculum and personalized information about the 40 students it was programmed to educate. That same year, David Silver developed The Silver Arm, capable of intricate movements similar to those of a human hand. The SCARA (Selective Compliance Assembly Robot Arm) was created in 1978 as a versatile 4-axis robotic arm and was implemented in assembly lines starting in 1981. In 1979, the Stanford Cart successfully navigated a room filled with chairs using stereo vision for distance measurement. Additionally, Raj Reddy established the Robotics Institute at Carnegie Mellon University in 1979.
In 1981, Takeo Kanade developed the first “direct-drive arm,” which enhanced robotic precision and control. In the year 1984, Wabot-2 was unveiled, showcasing advancements in humanoid robotics. In 1986, Honda initiated a research and development program focused on creating humanoid robots designed for effective interaction with humans. Then, in 1989, MIT introduced Genghis, a hexapodal robot that demonstrated innovative movement capabilities.
The Cyberknife, a robotic assisted surgery device, invented by John R. Adler, was first installed at Stanford University in 1991. In 1996, doctoral student David Barrett at MIT developed RoboTuna, a biomimetic robot.
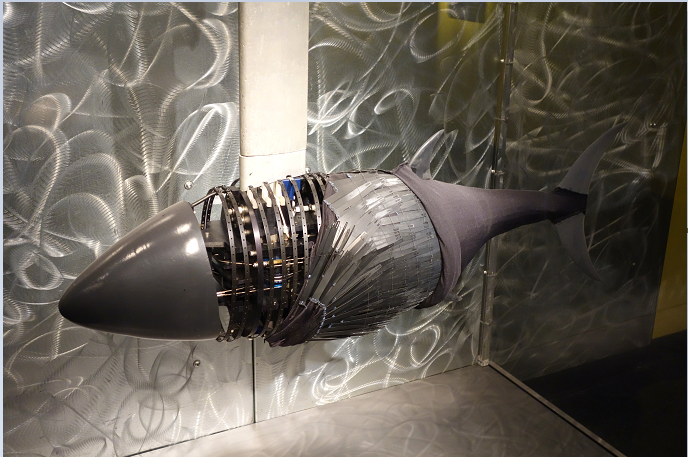
Robo Tuna (Source: MIT Mueum, photograph by Daderot)#
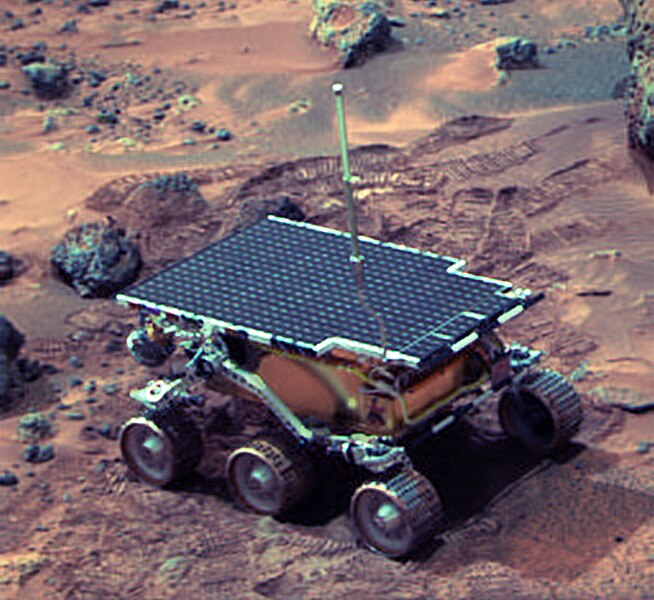
Sojourner (Source: Wikipedia)#
That same year, Honda showcased its P2 humanoid robot. Although the Sojourner rover was expected to operate for only seven days, it continued functioning for an impressive 83 days before shutting down in 1997.
Honda introduced the P3 humanoid robot in 1998, continuing its work in humanoid robotics. In 1999, Sony launched the AIBO, an interactive robotic dog. Then, in 2000, Honda unveiled ASIMO, a significant advancement in their humanoid project, while Sony introduced its Sony Dream Robots, small humanoid robots aimed at the entertainment market.
In April 2001, the Canadarm2 was launched and attached to the International Space Station. During the same month, the Global Hawk, an unmanned aerial vehicle, completed its first autonomous non-stop flight over the Pacific Ocean, lasting 22 hours. The Roomba, a robotic vacuum cleaner developed by iRobot, was released in 2002 and quickly gained popularity. Cornell University introduced a modular robotic system in 2005 that could attach and detach individual blocks. The Mars rovers Spirit and Opportunity, launched in January 2003, successfully landed on the Martian surface. By around 2005, self-driving cars were beginning to emerge, although their technology still had significant room for improvement. Stanford’s autonomous vehicle, Stanley, wins the DARPA Grand Challenge race in 2005. Honda unveiled an updated version of ASIMO in 2005, enhancing its behaviors and capabilities. In 2006, Cornell introduced the “Starfish” robot, a four-legged machine capable of self-modeling and learning to walk after sustaining damage. In 2007, TOMY launched the i-sobot, a humanoid bipedal robot designed for entertainment.

Roomba (Source: Wikipedia, author Guzugi)#
Robonaut 2 was sent to the International Space Station in 2011, marking the debut of a humanoid robot in space.
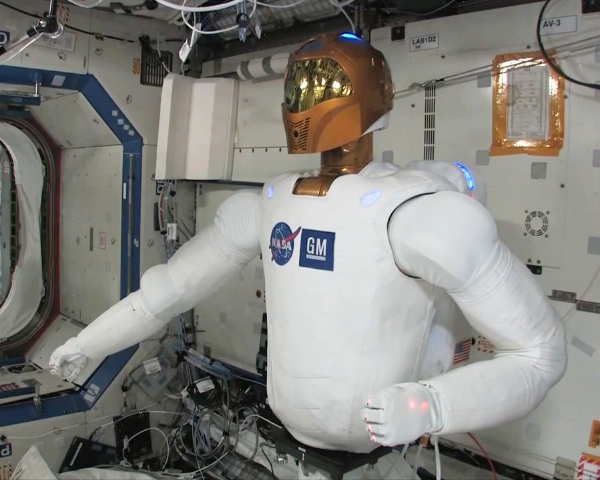
Robonaut 2 (Source: Wikipedia)#
In 2012, George Hinton and his team at the University of Toronto introduced “deep learning,” an AI technique capable of analyzing and categorizing millions of images with impressive accuracy. By the end of the decade, quadcopters had become a common platform for robotics, equipped with autonomous navigation, stabilization features, and advanced sensors like high-definition cameras and radar, all while becoming more affordable.

Quadcopter (Source: Wikipedia, author Josh Sorenson)#
The advancement of mobile data networks and the increasing power of graphics cards for AI applications enabled robots to communicate in real-time with remote clusters. Throughout the 2010s, neural networks advanced significantly, enhancing robots’ capabilities in facial recognition and object detection. The rise of open-source hardware, such as Raspberry Pi and Arduino, along with a wider range of affordable electronic components like sensors and motors, facilitated the rapid and cost-effective construction of specialized robots with high levels of AI. In 2014, Tesla began equipping its vehicles with the hardware necessary for future autopilot capabilities. On October 25, 2017, at the Future Investment Summit in Riyadh, a humanoid robot named Sophia made headlines by becoming the first robot to be granted citizenship. In 2019, engineers at the University of Pennsylvania successfully created millions of nanobots in just a few weeks.
With this article “History and Evolution of Robotics” is concluded. The further articles will discuss the classifications of robots based on different criteria or types.